EASIER focuses on robots for supporting emergency forces and assisting them in crisis situations, and more specifically on semi-autonomous mobile manipulators with variable levels of autonomy. In this context, both the trust in the system and the cognitive load generated by its use are very important to consider. The project therefore aims at developing sound and field-ready methods for measuring trust and cognitive load when using assistance robots, especially by investing 1) User interfaces with robot, 2) different levels of autonomy, 3) explainability of the system´s decisions. Experiments involving mobile manipulators and first responders in realistic scenarios will be performed as a support to develop new methods for measuring trust and cognitive load and improving them by making new developments in interaction design, autonomy management and transparency.
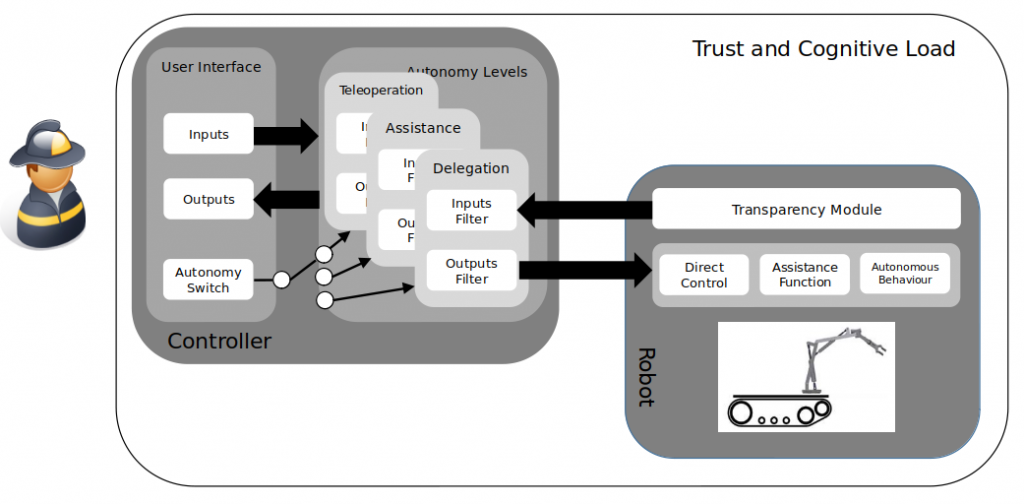
A system overview is shown below: